АСУ відвідного рольганга прокатного стану
Компанія «Плутон» разом з німецькою компанією «transresch Antriebssysteme Berlin GmbH» реалізували проект з модернізації електроприводів відвідного рольганга та зі створення АСУ процесу транспортування прокатаної стрічки від останньої кліті до моталок, згортальних машин або до летючих ножиць.
В результаті реалізації проекту були вирішені наступні задачі:
-
максимальна автоматизація процесу управління електроприводами рольганга;
-
виключення появи браку прокату за рахунок транспортування;
-
забезпечення автоматичного та ручного режимів управління рольгангом, режимів завдання швидкості транспортування стрічки, можливості завдання індивідуальної швидкості для кожної групи;
-
значне поліпшення динаміки роботи електроприводу, з метою підвищення продуктивності та скорочення простоїв;
-
забезпечення всебічного автоматичного контролю роботи всіх ланок АСУ ТП та електроприводу з візуалізацією даних та архівацією відхилень в роботі;
-
забезпечення інтеграції системи управління рольгангом в автоматизовану систему управління прокатного стану;
-
зменшення витрати електроенергії та пікових струмових навантажень живлячого трансформатора в динамічних режимах роботи;
-
виключення споживання реактивної потужності приводом рольганга.
- ЕЛЕКТРОПРИВОД
- СИСТЕМА АВТОМАТИЧНОГО УПРАВЛІННЯ РОЛЬГАНГОМ
- СТРУКТУРА ТА АПАРАТНІ ЗАСОБИ СИСТЕМИ
- ЗАСОБИ ПРОГРАМУВАННЯ
- ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ
Для управління двигунами рольганга німецькою фірмою «transresch Antriebssysteme Berlin GmbH» були виготовлені та поставлені перетворювачі частоти, що мають усі якості найсучасніших перетворювальних пристроїв:
-
шафного виконання, готові до підключення, із вбудованими силовими запобіжниками, роз'єднувачем, вхідним реактором, фільтром радіоперешкод, вихідним синусоїдальним фільтром;
-
з можливістю реалізації однодвигунних та багатодвигунних асинхронних електроприводів;
-
що забезпечують стійкий без перекидання руховий та генераторний режими роботи, гальмування з рекуперацією енергії в живильну мережу
-
що мають синусоїдальний вхідний струм з можливістю регулювання коефіцієнта потужності від - 0,8 до + 0,8
-
з управлінням та обміном інформацією за допомогою послідовного інтерфейсу Profibus DP;
-
з високою динамікою, реверс моменту менш ніж за 2 ms, з повноцінним забезпеченням всіх характеристик приводу в 4-х квадрантах;
-
з повною діагностикою всіх систем, із запам'ятовуванням нештатних ситуацій, аварійний слід, зі всіма необхідними для перетворювача та двигуна захистами.

Основним призначенням системи, що розробляється, було формування та розподіл сигналів завдання (корекції) швидкості по перетворювачах частоти кожної групи відвідного рольганга, управління секціями рольгангу при транспортуванні стрічки в різних режимах та сигналізація про стан обладнання.
Відповідно до поставленого завдання система управління забезпечила:
-
постійний обмін даними між PLC СУ, збір, обробку та аналіз інформації про стан рольгангу і СУ;
-
вироблення керівних впливів, передачу (сигналів, команд) на виконання;
-
технологічну сигналізацію, відображення необхідних параметрів та коефіцієнтів;
-
оперативне введення та зміна швидкісних параметрів, оперативна зміна параметрів налаштування системи;
-
контроль за дотриманням технології операторами СУ з необхідними блокуваннями та обмеженнями, захист від некоректних дій персоналу, несанкціонованого втручання;
-
алгоритми управління в різних режимах роботи, у тому числі алгоритми «розгону», «зупинки», «клину швидкостей», «пригальмовування»;
-
діагностування, із вказанням місця, виду та причини виникнення порушень правильності функціонування рольганга та СУ;
-
ведення журналу роботи системи, реєстрація та зберігання інформації про передаварійний стан СУ та ПЧ, що беруть участь в роботі («аварійний слід»);
-
інтуїтивно зрозумілий графічний інтерфейс;
-
підтримка єдиного часу у всій системі.
Управління приводами здійснюють контролерні частини системи управління та перетворювачів частоти (PLC СУ та ПЧ). Управління приводами груп рольгангу є паралельним та незалежним, тобто PLC СУ одночасно виробляє керівні сигнали та взаємодіє зі всіма РLС ПЧ, що беруть участь в роботі.
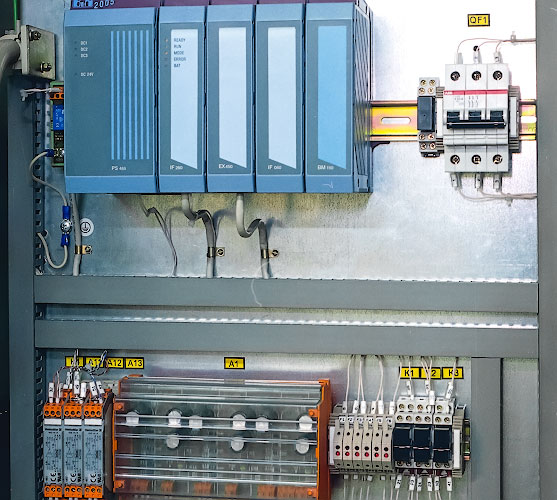
PLC СУ побудована на основі контролерів B&R SYSTEM 2003 та 2005. До складу PLC СУ входять дві шафи управління (ШУ), одна з них є резервною, три пульти (ПУ) та шість шаф з контролерами збору інформації про стани віддалених входів (PLC RIO).
Кожна ШУ укомплектована керівним контролером (PLC) та контролером з панеллю візуалізації (PLC ПВ). Резервна ШУ знаходиться в гарячому резерві, автоматично переходить на режим роботи основної ШУ та у будь-який момент може вступити в роботу замість неї без будь-яких додаткових налаштувань.
Три операторські пульти управління (ПУ) розосереджені уздовж прокатного стану. Кожен з трьох ПУ укомплектований PLC ПВ, що дозволяє здійснювати повнофункціональне управління з будь-якого з постів управління. Шість PLC RIO розосереджені уздовж рольгангу, безпосередньо біля шаф з автоматичними вимикачами двигунів груп рольгангу.

Для створення програмного забезпечення (ПО) використовувалась B&R Automation Studio 2.10 (AS). AS дозволяє створювати інтелектуальні системи збору та обробки інформації. Для розробки програм системи управління була застосована мова «C». Для інтеграції керівних PLC у мережу Profibus DP був використаний B&R Fieldbus Configurator.
Впровадження системи здійснювалось на постійно працюючому об'єкті — рольганг надавався для налагодження на 15-20 хвилин 1-2 рази на день.
В деяких випадках для налаштування особливо складних алгоритмів були розроблені моделі з використанням пакету Borland C++Builder 5.

При побудуванні ПЗ були дотримані наступні принципи:
-
функціональна достатність (повнота);
-
надійність та достовірність (відповідність заданому алгоритму роботи, контроль та фільтрація вхідної інформації, відсутність помилкових дій);
-
модульність побудування та інкапсуляція (ПЗ розбите на завдання, кожне завдання працює лише зі своїми даними);
-
багатозадачність (одночасне виконання декількох програм);
-
ієрархічність (різні пріоритети програм);
-
адаптивність та гнучкість (можливість швидкого конфігурування та можливість швидкої перебудови алгоритмів управління);
-
можливість модифікації (можливість модифікації та розширення, модернізації, розвитку та нарощування);
-
зручність експлуатації та супроводу.
Документація
Всі документиЧим ми можемо Вам допомогти?
Якщо у Вас є технічні питання, питання щодо індивідуальної комплектації або терміну постачання обладнання, будь ласка, зв'яжіться з нами
